|
|

|
|
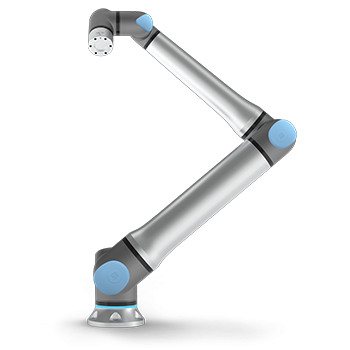
��е�ֱ۷������?UR������һƪ�ɻ���������
������֪,��е�ֱۿ���ϸ��Ϊ�ܶ����ͣ�������������,����UR�����˸������ֱ��,��ƪ���ľ���ֵ�����ղ�.�����ǻ�е�ֱ��������ķ��ʽ. 1�������β��˶���ʽ ��е�ֱ۰��۲����˶���ʽ��Ϊ���֣�a.ֱ�������͵ı۲���������ֱ�������ƶ�;b.Բ�������͵ı۲�������������ת����������; c.�������͵ı۲��ܻ�ת������������;d.�ؽ��͵ı۲��ж��ת���ؽڡ�
ͼԴUR�����˹��� 2����ִ�л������ƻ��� ��е�ֱ۰�ִ�л����˶��Ŀ��ƻ��ܣ��ֿɷ���λ���������켣���� ��λ��ֻ����ִ�л�����һ�㵽��һ���ȷ��λ�������ڻ��������ϡ��㺸��һ����ˡ�װж����ҵ�� �����켣���ɿ���ִ�л����������켣�˶����������������Ӻ�Ϳװ����ҵ��
ͼԴUR�����˹��� 3�����ճ������뷽ʽ ��е�ֱ۰��������뷽ʽ�����������������ʾ�����������ࡣ ����������ǽ���������ѱ�õ���ҵ�����ļ���ͨ��RS232���ڻ�����̫����ͨ�ŷ�ʽ���͵������˿��ƹ� ʾ����������ʾ�̷��������֣�һ�����ɲ��������ֶ�������(ʾ�̲��ݺ�)����ָ���źŴ�������ϵͳ��ʹִ�л�����Ҫ��Ķ���˳����˶��켣����һ�顣��һ�����ɲ�����ֱ���춯ִ�л�������Ҫ��Ķ���˳����˶��켣����һ�顣��ʾ�̹��̵�ͬʱ�������������Ϣ���Զ��������洢�����ڻ������Զ�����ʱ������ϵͳ�ӳ���洢���м����Ӧ��Ϣ����ָ���źŴ�������������ʹִ�л�������ʾ�̵ĸ��ֶ����� ͨ��һ��Ľ��;���,�������������ǰ¼�����,��е�ֱ۾ͻ��Զ�ִ����;ʾ�������������С��һ��,���Ż�е�ֱ۲���һ��,���ͻ��ס�Լ������ˡ�
ͼԴUR�����˹��� ͨ�����ϵķ����Dz��ǶԻ�е�ֱ����˺��������˽���?�������Ҫ�˽������ڻ�е�ֱ۵���ظɻ���Ϣ,���Ʋ���UR�����˹���(www.universal-robots.cn)
|
|||||||||||
 |
|||||||||||
 |
| �Ƽ����� |
| ͼƬ���� | ||||
|
|
||||
| �������� |
| �������� |
| ������� |

|

|